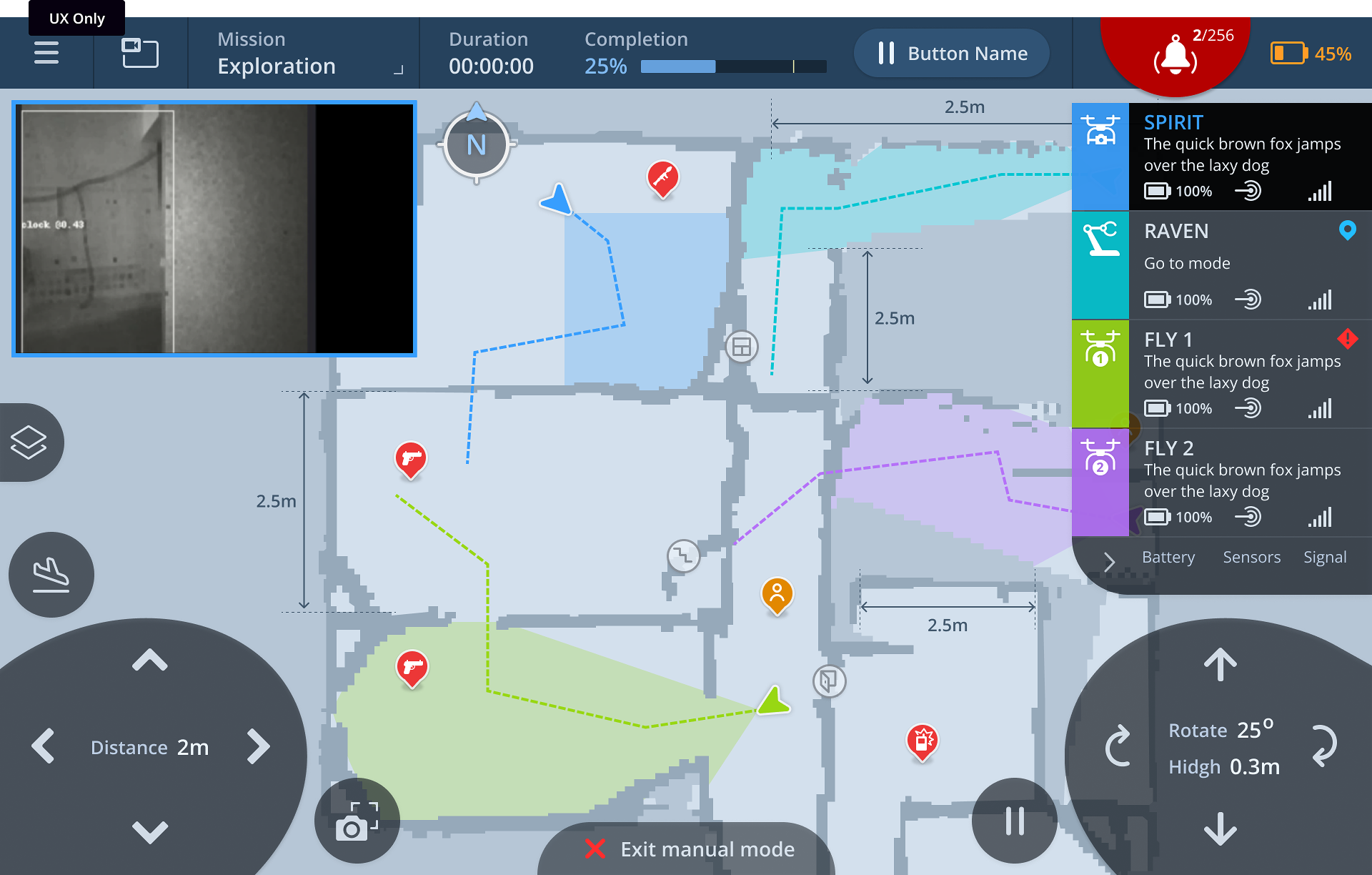
Mission-Centric Command Interface
From our research and analysis, we understood that the key to success was to place the mission at the center – not the individual tools.
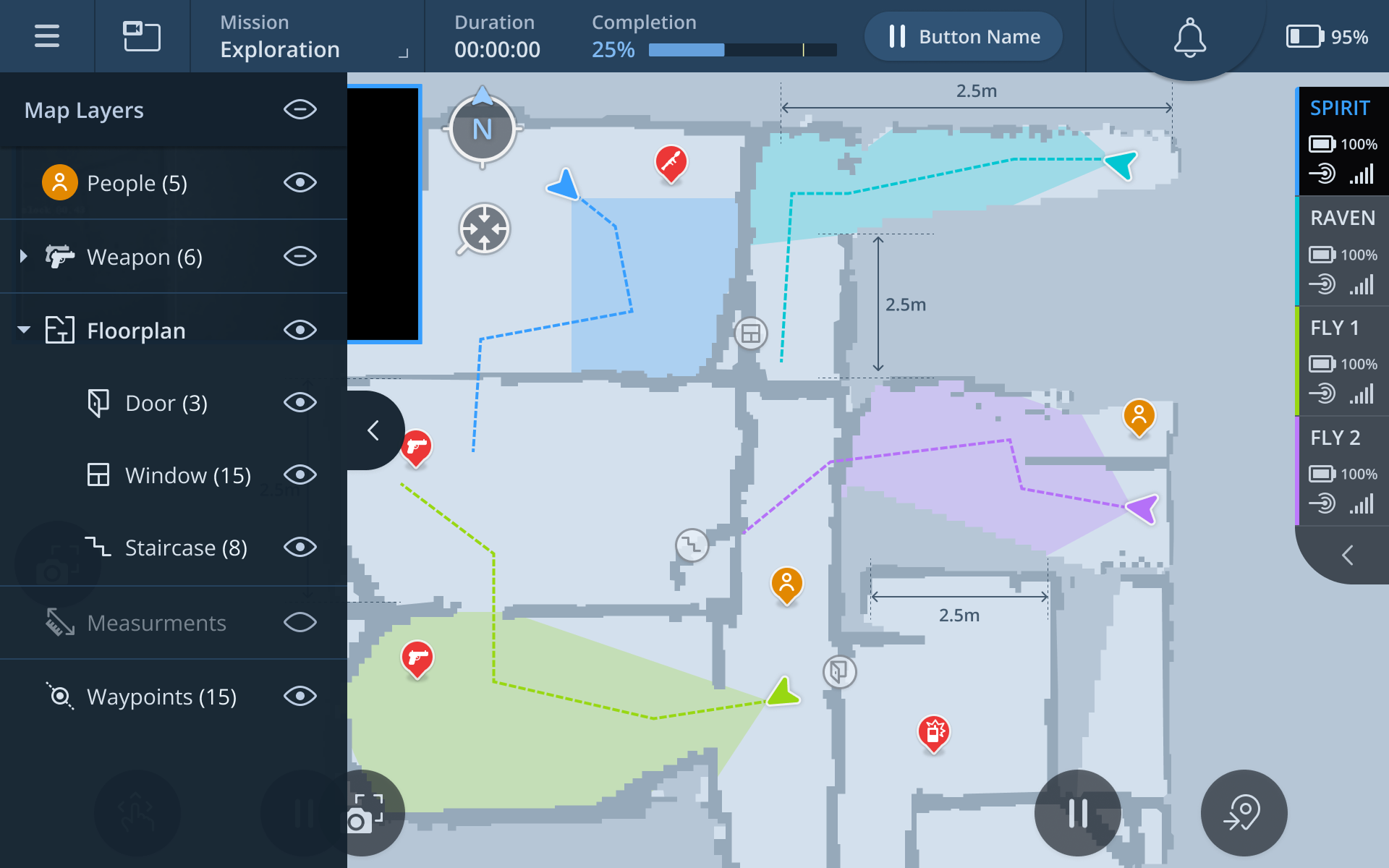
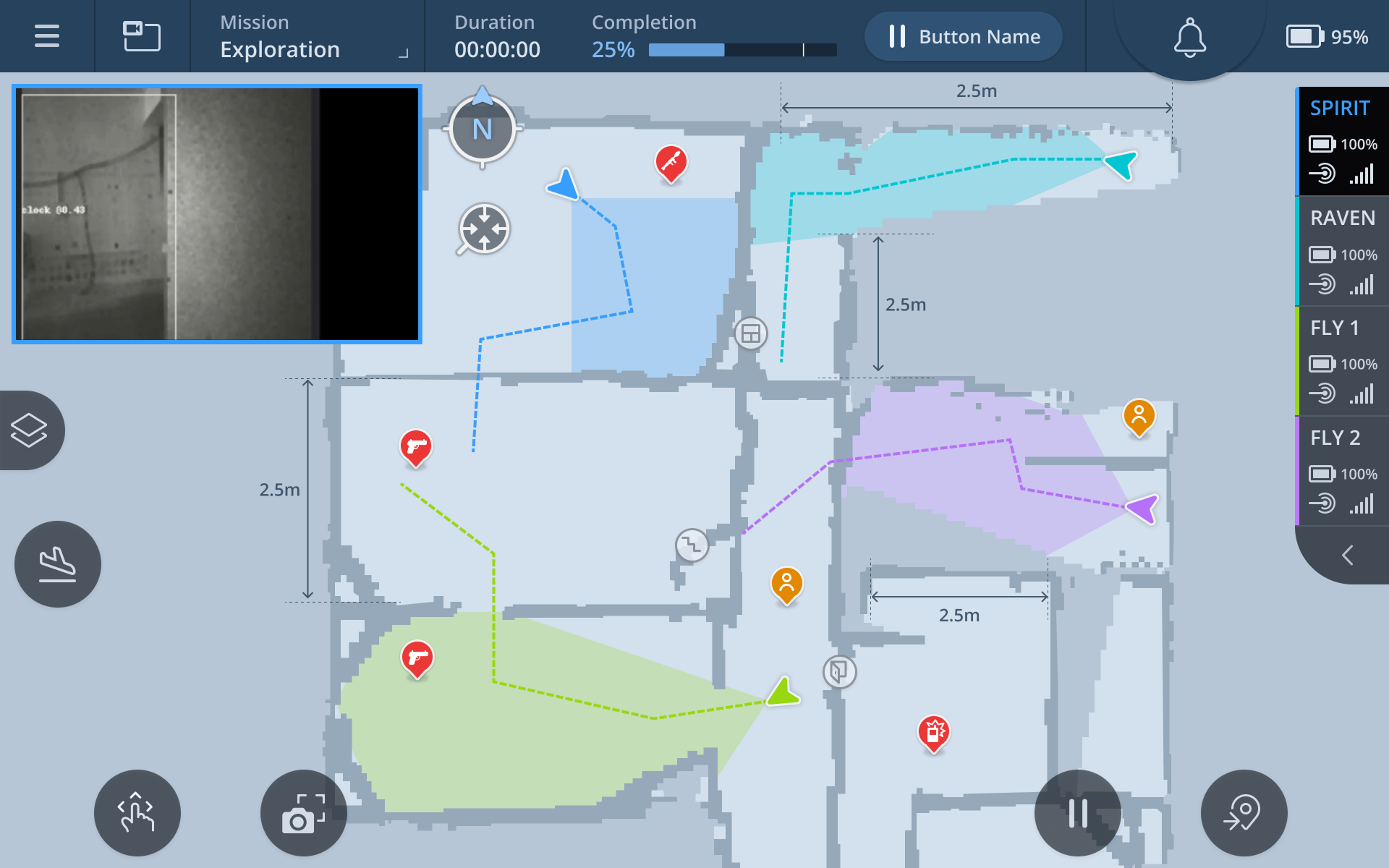
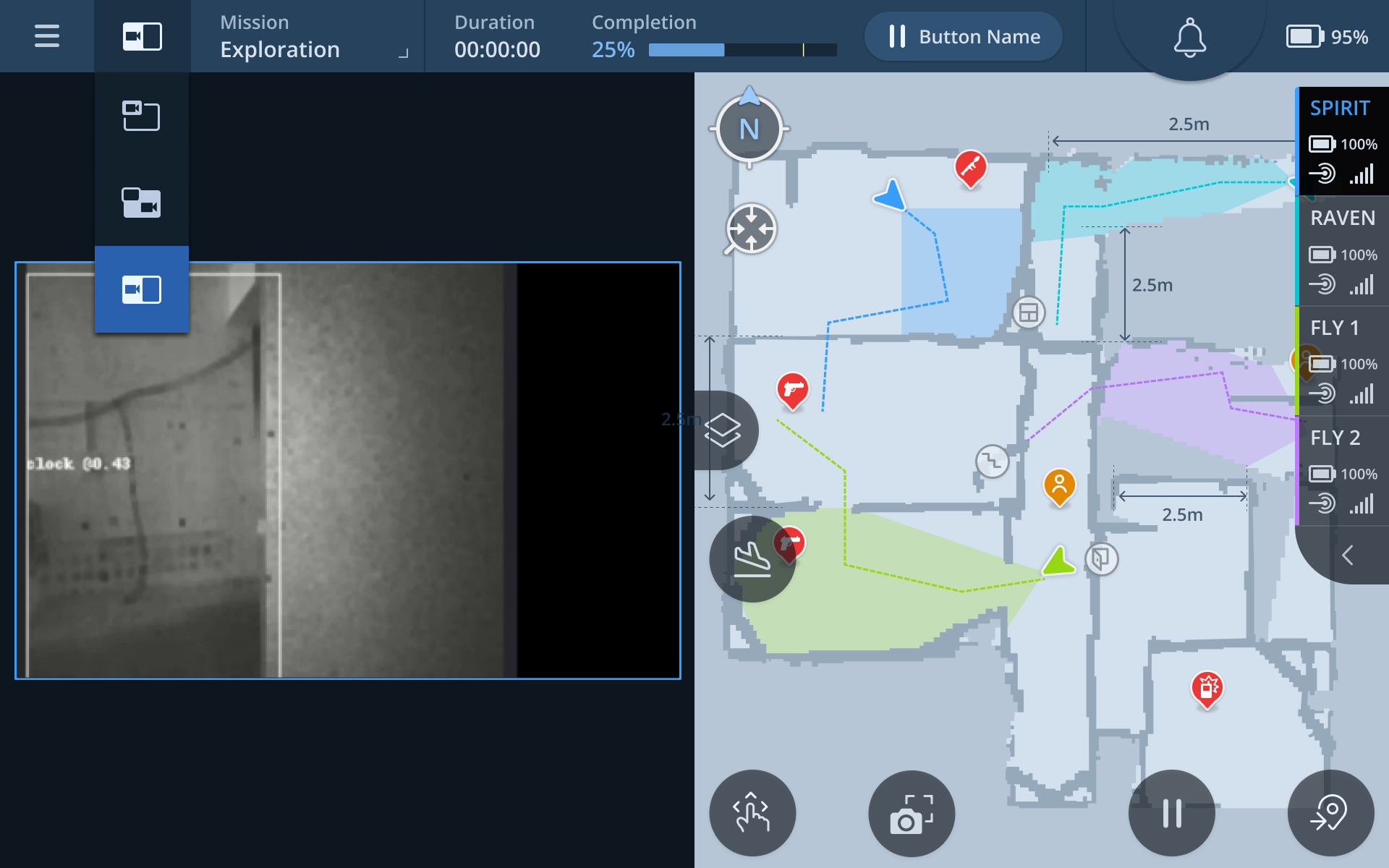
We designed a mission-centric interface that presents a clear real-time operational picture: map progress, coverage percentage, detected findings such as people, weapons, explosives, and inaccessible areas, as well as the overall mission status.
The interface allows the operator to monitor autonomous activity, understand what each tool has detected, and stay focused on the mission as a whole – while maintaining the ability to override autonomy and take control at any moment.